|
步进电机的基本工作原理
步进电机有两种基本的形式:可变磁阻型和混和型。步进电机的基本工作原理,结合图1的结构示意图进行叙述。

图1是一种四相可变磁阻型的步进电机结构示意图。这种电机定子上有八个凸齿,每一个齿上有一个线圈。线圈绕组的连接方式,是对称齿上的两个线圈进行反相连接,如图中所示。八个齿构成四对,所以称为四相步进电机。
它的工作过程是这样的:当有一相绕组被激励时,磁通从正相齿,经过软铁芯的转子,并以最短的路径流向负相齿,而其他六个凸齿并无磁通。为使磁通路径最短,在磁场力的作用下,转子被强迫移动,使最近的一对齿与被激励的一相对准。在图1(a)中A相是被激励,转子上大箭头所指向的那个齿,与正向的A齿对准。从这个位置再对B相进行激励,如图1中的(b),转子向反时针转过15°。若是D相被激励,如图1中的(c),则转子为顺时针转过15°。下一步是C相被激励。因为C相有两种可能性:A―B―C―D或A―D―C―B。一种为反时针转动;另一种为顺时针转动。但每步都使转子转动15°。电机步长(步距角)是步进电机的主要性能指标之一,不同的应用场合,对步长大小的要求不同。改变控制绕组数(相数)或极数(转子齿数),可以改变步长的大小。它们之间的相互关系,可由下式计算:
Lθ=360
P×N
式中:Lθ为步长;P为相数;N为转子齿数。在图1中,步长为15°,表示电机转一圈需要24步。
混和步进电机的工作原理
在实际应用中,最流行的还是混和型的步进电机。但工作原理与图1所示的可变磁阻型同步电机相同。但结构上稍有不同。例如它的转子嵌有永磁铁。激励磁通平行于X轴。一般来说,这类电机具有四相绕组,有八个独立的引线终端,如图2a所示。或者接成两个三端形式,如图2b所示。每相用双极性晶体管驱动,并且连接的极性要正确。
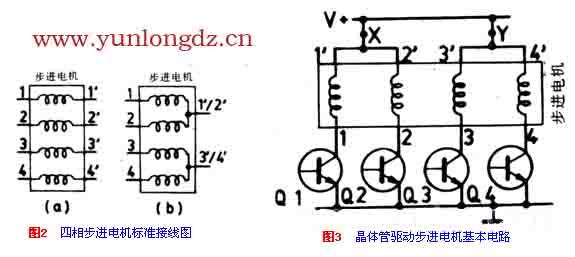
图3所示的电路为四相混和型步进电机晶体管驱动电路的基本方式。它的驱动电压是固定的。表1列出了全部步进开关的逻辑时序。
|
 |
 |
值得注意的是,电机步进为1―2―3―4的顺序。在同一时间,有两相被激励。但是1相和2相,3相和4相绝对不能同时激励。
四相混和型步进电机,有一特点很有用处。它可以用半步方式驱动。就是说,在某一时间,步进角仅前进一半。用单个混合或用双向开关即可实现,这种逻辑时序由表2列出。
四相混和型步进电机,也能工作于比额定电压高的情况。这可以用串联电阻进行降压。因为1相和2相,3相和4相是不会同时工作的,所以每对仅一个降压电阻,串接在图3中的X和Y点之间。因此额定电压为6V的步进电机,就可以工作在12V的电源下。这时需串一个6W、6Ω的电阻。
 |
